Content
Understanding the Fundamental Limitations of Conventional Pick-and-Place Systems
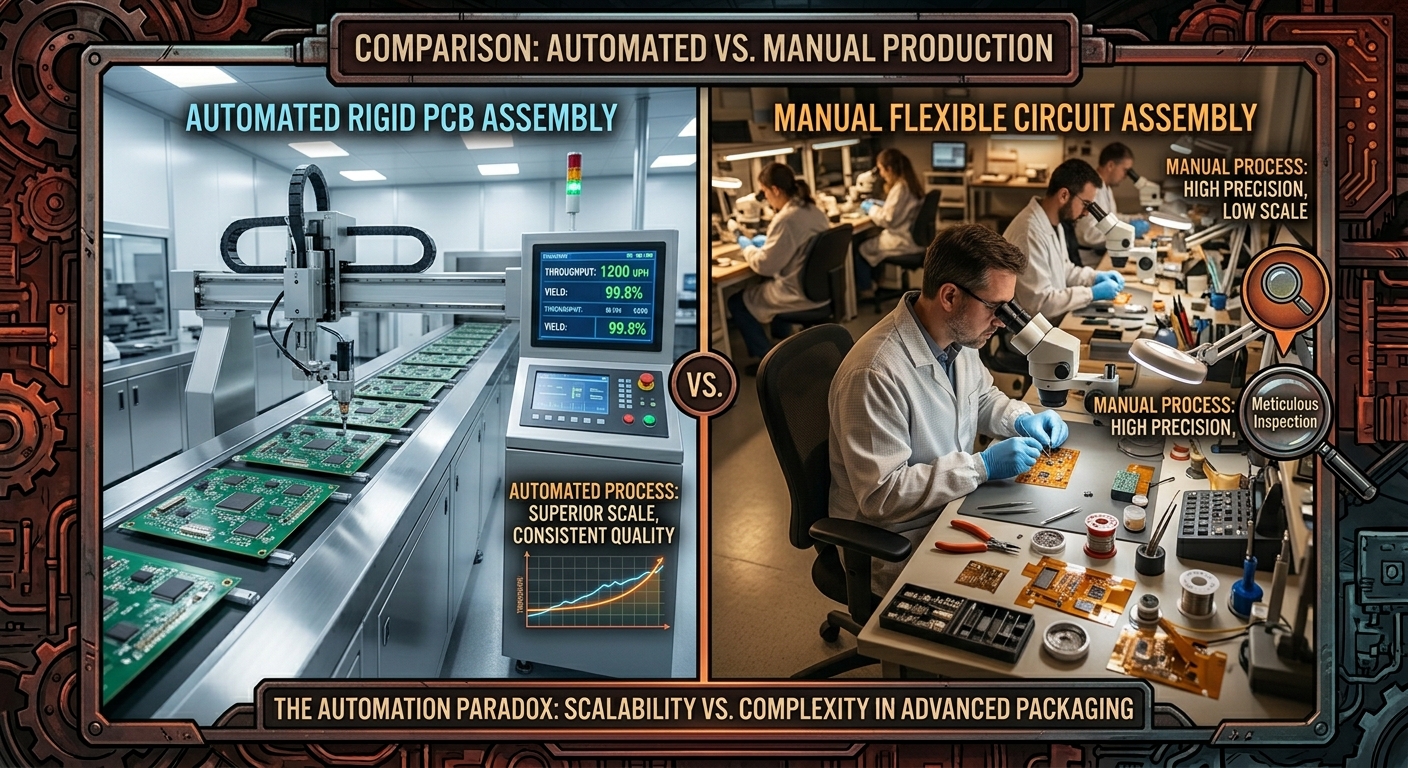
Walk into most electronics manufacturing facilities and you’ll see sophisticated automated pick-and-place machines assembling rigid PCBs with impressive speed and precision. Yet shift your attention to flexible circuit production, and you’ll often find manual assembly stations staffed by technicians working under microscopes. Why hasn’t automation solved flexible PCB assembly the way it revolutionized rigid board production?
The answer reveals fundamental limitations in traditional automation approaches that are creating a gap between what manufacturers need and what conventional technology can deliver.
The Single-Arm Constraint
Most industrial robots feature a single arm optimized for simple pick-and-place operations. This works fine for rigid boards with components that stay in place once positioned. But flexible circuit assembly frequently requires two-handed manipulation that single-arm systems simply can’t perform.
Consider installing a flexible cable assembly. A skilled technician holds the substrate with one hand while routing the cable with the other, then secures it while maintaining proper positioning. Or think about installing snap-fit shields that require simultaneous holding and pressing. These tasks are natural for humans with two coordinated hands, but they’re impossible for single-arm robots. This reality forces manufacturers to retain manual operations for precisely the tasks where automation would deliver the greatest value.
Rigid-Board Assumptions
Conventional placement equipment assumes dimensionally stable substrates that lie flat and stay flat. Flexible polyimide films fundamentally violate these assumptions. They bow, curl, and deform due to material stresses, moisture absorption, and thermal history. And since they’re often as thin as 25-50 microns, it’s understandable that they easily tear under improper handling.
Fixed-force placement systems designed for rigid boards apply excessive pressure which damages delicate substrates or causes delamination between layers. Vacuum fixtures that adequately secure rigid boards create stress concentrations that wrinkle or damage flexible materials. As a result, the substrate handling approaches that work perfectly for rigid boards catastrophically fail for flexible circuits.
The Changeover Economics Problem
Traditional automation requires extensive reprogramming and mechanical retooling for each product variant. Custom fixtures must be designed, fabricated, and validated which takes weeks and costs tens of thousands of dollars per product. Furthermore, programming changes require days of engineering time and the changeover from one product to another can consume 4-8 hours.
This economic structure limits the viability of automation to only very high volumes of identical products. In today’s reality of high-mix, low-volume manufacturing where product variants change frequently and batch sizes measure in hundreds, the changeover times and costs destroy the business case. As a result, manufacturers face an impossible choice: maintain manual operations with all their limitations, or pursue automation that’s economically unviable for their production mix.
Vision System Inadequacy
Most pick-and-place machines use 2D vision by employing cameras that capture images and analyze them for component recognition and alignment. This approach works adequately for rigid boards with consistent topology but misses critical information on flexible assemblies.
Consider these defects that are completely invisible to 2D imaging: a solder joint may appear acceptable from above but lack proper fillet height; components seated at an angle make partial contact but appear properly centered in planar views.; and flexible substrates with local height variations confuse systems that are expecting flat reference planes. As a result, the 2D vision technology that’s sufficient for rigid boards is woefully inadequate for flexible circuit quality assurance.
Precision Limitations
Typical pick-and-place placement accuracy of ±50-75μm was sufficient when components had 0.5mm pitch and comfortable tolerances. But as electronics miniaturized and began having components with 0.3mm pitch, margins for error shrank to single-digit microns. Conventional automation simply wasn’t designed for this level of precision and can’t reliably achieve it.
The Missing Middle Ground
These limitations create a frustrating situation. Manufacturers need automated solutions for flexible circuits, but conventional automation can’t handle their products. The choice becomes binary: manual assembly with workforce challenges, or automation that can’t actually do the job.
This gap explains why flexible PCB manufacturing remains surprisingly manual despite automation advances transforming other industries. Filling this gap needs more than just incremental improvements to traditional pick-and-place systems. Instead, it requires fundamentally different technological approaches that were designed specifically for flexible circuit challenges. The future of flexible PCB automation demands dual-arm coordination, adaptive force control, 3D vision, rapid reconfiguration capability, and a level of precision that exceeds conventional systems. Until automation providers can deliver these capabilities, manufacturers will remain trapped between inadequate options and the competitive disadvantages that come with them.
To learn more, read our white paper, Beyond Traditional Automation: Why Conventional Pick-and-Place Systems Cannot Solve Flexible Circuit Assembly (no form fill necessary).